概要
激光雷達是一項測繪技術,采用激光來測量設備到目標表面的距離。簡言之,這項技術能以驚人的精度為房間、大面積地形等各類對象生成三維地圖。我們將在本文介紹激光雷達解決方案的功能特征、各種類型及應用方式。
激光雷達類型
機載式、移動式、固定式
目標應用
計算深度和距離,基于捕獲的數據生成地圖,并用于工程、建設、城市規劃等多個領域。
距離
遠距、超遠距;大型、超大型空間

在深入了解激光雷達掃描的原理之前,首先,我們來了解下激光雷達英文名稱LiDAR是怎么來的。“radar”(雷達)的名稱來源于“radio detection and ranging(無線電探測和測距)”,“sonar”(聲吶)來源于“sound detection and ranging”(聲音探測和測距)。而LiDAR同樣是縮寫。
“Light detection and ranging(光探測和測距)”或“laser imaging, detection, and ranging(激光成像、探測和測距)”,無論哪種方式的首字母縮寫,都是LiDAR。
激光雷達能捕獲的范圍各不相同:從海拔、坑洞、植被到整個城市,您都可以在電腦屏幕上看到它們的三維地圖,還能放大查看細節,或查看完整全貌。激光雷達,可謂功不可沒。
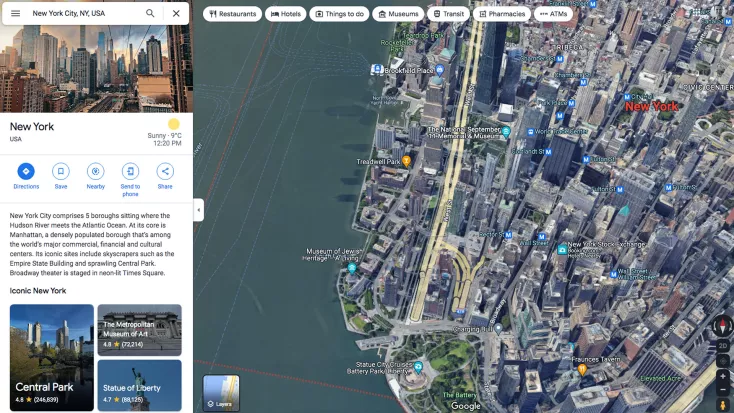
為了更直觀地介紹激光雷達的功能,這里舉例說明:紐約市的三維地圖就是根據激光雷達的空間數據、全彩相片、衛星圖制作的。這張地圖,以及您經常看到的其他城鎮地圖都可以在谷歌地圖上輕松訪問,同時,您還可以從各個角度(除了底部)仔細查看摩天大樓、廣場、紀念碑等各種地標建筑,細節驚人。當然,我們也能看平面圖,但如果大型城市的俯瞰圖能有平面圖遠不能及的真實感,我們為何棄之不用呢?
除了制作精彩圖片,激光雷達還有什么過人之處?
激光雷達已經為工程、建筑、城市規劃等領域提供了巨大的可能性,這些領域的諸多決策取決于能否獲得大型、超大型表面區域形狀和尺寸的精確信息。比如,你要在山區修建一條馬路,您需要知道要準備多少建筑材料,以及施工需要多長時間。道路長度不僅僅是兩點間的距離。要解決這一問題,您要考慮沿途所有起伏道路。但解決這個問題,難道要帶著卷尺和指南針去森林嗎?這不現實。這時,機載激光雷達系統就能為您提供一個快速準確的解決方案。
要點
激光雷達技術為工程、建筑、城市規劃等領域帶來了新的可能,這些領域的不少決策都取決于能否獲得大型、超大型表面區域形狀和尺寸的精確信息。
激光雷達工作原理
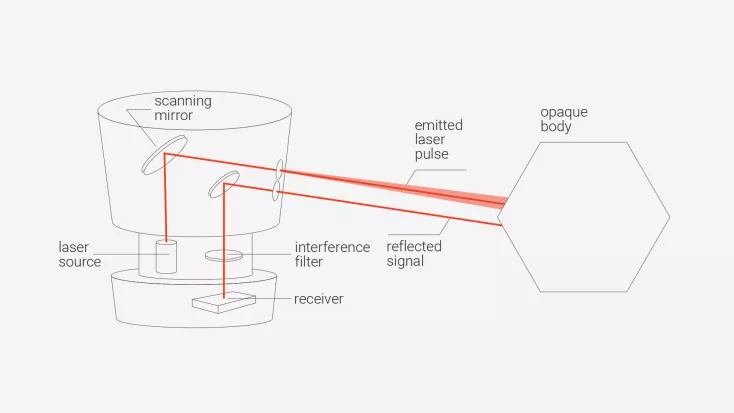
激光雷達傳感器通過發射激光束來掃描周圍環境。光線照射到表面時,會反彈至激光雷達設備,設備接收射入信號。激光雷達會根據使用的技術,通過記錄光束返回的時間或分析射入信號的相移,來計算設備到表面的距離。
要點
激光雷達通過記錄光束返回的時間或分析射入信號的相移,來計算設備到表面的距離。
該傳感器由兩個關鍵部分組成:發射器與接收器。發射器朝著被掃描物體的方向發射多達幾十萬個激光脈沖。脈沖一旦到達表面,即會反彈或反向散射,隨后,信號被接收器接收。定時電子裝置計算脈沖從傳感器抵達目標表面并返回所用的時間,確切來說,即返回延遲的時間。
延遲越久,說明表面距離傳感器的距離越遠。這項技術被稱為飛行時間激光掃描。請注意,移動或機載激光雷達系統還有慣性測量單元(IMU,由加速度計、陀螺儀和其他傳感器組成)和GPS跟蹤器,以獲得激光脈沖每個發射時間點上收發器的XYZ坐標。所有這些數據都由計算機進行分析,輸出的是點云數據格式的表面三維地圖。
除了飛行時間外,還有相位轉移技術。相位掃描技術利用一束從掃描儀發射出的恒定激光能量,測量返回激光能量的相移并據此計算距離。
重要術語
飛行時間:利用脈沖在兩點之間移動的時間來計算兩點間距。
相位轉移:計算以相同頻率或時間發射的兩個波形間的延遲。
飛行時間掃描儀和相位掃描儀之間的主要區別體現在捕獲速度和工作范圍。飛行時間掃描儀的采集速度通常在每秒幾百至幾千點。而相位掃描儀的速度能達到每秒幾十萬點。相位掃描儀速度更快,使之成為諸多應用場景下的首選工具。
另一方面,飛行時間掃描儀的工作范圍更廣,從一米到一公里,都能采集有效數據。飛行時間掃描儀也因此更適合遠距測量的應用場景。
激光雷達掃描儀精度
根據掃描儀類型和環境條件,激光雷達系統的精度范圍可以從亞毫米級到幾十、幾百毫米不等。不少因素可以影響激光雷達掃描儀所收集的3D數據準確度。
和其他掃描儀一樣,激光雷達是工廠標定設備。在交付給客戶前,掃描儀將“接受訓練”,在已知位置測量與幾百個反射率已知的目標物距離。誤差函數已創建并存儲在掃描儀軟件中。但是,工廠標定無法涵蓋掃描儀在特定項目中可能掃描的全部表面類型,因此,間距有時是基于反射率已知的相近表面數值計算的。
另一個重要因素是區間噪點,即每次獨立測量值和平均距離間的差異。區間噪點主要受掃描物體的距離以及表面反射率等特性影響。
激光雷達掃描儀的機械部件也可能有誤差,特別是隨著時間推移,更有可能發生,因此,制造商建議每隔幾年就要重新標定掃描儀。
風速、太陽輻射、空氣溫度和濕度等環境因素也會扭曲激光脈沖的反向散射,影響收集數據的質量。
顯然,制造商十分了解可能影響激光雷達掃描儀精度的各類因素,從而確保掃描儀能產出無可比擬的優秀精度。我們將在下文介紹Artec Ray,這是一款角精度出色的激光雷達掃描儀。
激光雷達類型
我們已經提到了兩類激光雷達:移動式和機載式。再加上固定式,就是目前主流的三大類型。
固定式激光雷達掃描儀
我們先來介紹固定式激光雷達掃描儀,這是技術核心。所有其他類型都來源于此。和移動式、機載式系統相比,固定式激光雷達掃描儀通常適合處理較小面積。但是,固定式設備精度高。
固定式激光雷達掃描儀被廣泛應用于逆向工程、質量檢驗。借助激光雷達,您可以掃描房間、建筑和任何類型的車輛,無論是穿越陸地、空氣、水域還是外太空。
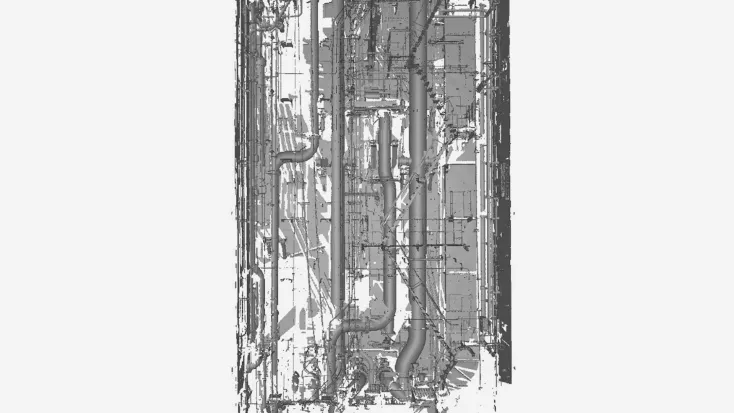
假設您需要改造一個面積達幾十平米的管道系統,或正計劃維修一棟建筑,又或者正在考慮逆向制造飛機機身。在這些場景下,您需要相關表面的精確尺寸。這時,固定式激光雷達掃描儀就能大顯身手。特別是遇到有些表面離地太高,想用手持掃描儀就必須先搭建一些腳手架,這時,固定式掃描儀就更方便了。
固定式激光雷達三維掃描儀Artec Ray制作的管道系統三維掃描。
現在,我們回過頭來,看看如何才能獲得截圖中的效果。換言之,如何使用激光雷達掃描儀?事實上,您要做的工作并不多。掃描儀被放在三腳架上,置于掃描物體或場景前。輕點一下,Artec Ray就會開始創建掃描區域的預覽圖像。如果預覽圖像就是您打算掃描的區域,那掃描儀位置無需再調整,那么Ray就會繼續進行完整捕獲,采集物體或場景的全部數據。
如果您希望在掃描處理階段時能更快完成對準,或提高三維掃描數據的準確度,您可以考慮在掃描區域內擺放標記點。掃描儀能在幾乎任何環境下輕松探測這些標記,并在掃描結束、數據收完后,依靠標記點,通過軟件快速高效地對齊所有掃描。

物體周圍擺放的標記點示例
一些激光雷達型的掃描儀,如Artec Ray,無需依賴標記點,就能完成配準和對齊,同時還能保持高的精度水平。Ray是目前市面上領先的計量級設備。Ray可與目標物相距110米,小到車身,大到大型飛機或建筑物,都能掃描。遇到規模如此龐大的項目,您一定不希望見到很多噪點和對齊不準的情況,也一定不愿意拿著設備再次返工,重新采集第一次失誤的地方。
但有了Artec Ray,就沒有后顧之憂:這款掃描儀在相距10-15米遠時,距離精度可達亞毫米級,角精度也毫不遜色,確保您在處理大面積表面時得到精準的效果。借助掃描預覽,您還可以檢查掃描儀的當前位置是否適合本次采集,如有必要,調整設備位置。

Artec Ray常規工作流程“維修室三維數據采集”。數據不僅可以傳輸至掃描儀連接的筆記本電腦,還可以無線傳輸至iPad甚至iPhone上。
達到Ray的掃描精度,就能基于3D模型逆向制造工業物品,對比大型機械部件的3D模型和CAD圖紙完成質量檢驗,還能制作3D雕像用于遺跡保護,為全球博物館制作在線展覽。應用場景數不勝數。
機載激光雷達掃描測繪
如果使用激光雷達傳感器在空中飛行,那應用范圍就更廣了。這正是在修建新路、鋪設山脊管道、設計全新高爾夫球場前,工程師們要做的工作。激光雷達掃描儀裝在飛機或直升機上,就能采集幾百平方公里的三維數據,不過,采集大型地面信息時,機載激光雷達就無法達到亞毫米級精度。這種情況下,公差范圍可達幾厘米,但這也足以滿足大部分大型項目的需要。
移動式激光雷達應用場景
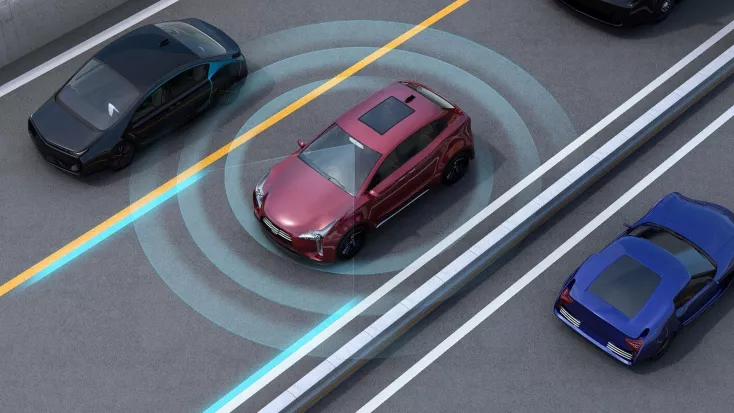
移動式激光雷達傳感器則把精度和掃描物體大小之間的關系拿捏得恰到好處,這也解鎖了更激動人心的應用場景,服務對象遠不止工程師。激光雷達系統可以安裝在自動駕駛汽車上,持續掃描周圍環境,實時計算與最近車輛、行人等任何障礙物之間的距離,以避免碰撞。
利用遙感技術保駕護航
激光雷達掃描儀與iPad Pro、iPhone Pro
激光雷達傳感器的消費級應用遠不止自動駕駛汽車而已。Apple的iPad Pro和iPhone Pro(12起),都能享受到激光雷達技術。這些設備可以掃描5米內的物體,隨后與IKEA Place應用程序整合,用AR技術為用戶布置房間,也能與“熾熱熔巖”整合,將玩家周圍環境變成游戲場景。
雖然Apple的激光雷達技術沒有達到制造業的精度和分辨率標準,但AR購物和游戲目前來看,是這項技術被看好的應用場景。iPad和iPhone引入激光雷達技術后,刺激了這些應用場景的發展,三維掃描技術用戶數量大幅上漲。Apple的小工具讓過去計量工程師、測繪師的專屬技術走到了普通用戶的眼前。
結論
謎題解開。激光雷達能實現諸多可能,無數應用場景值得我們探索。這項技術能幫助我們建造城市,制作細節圖片,修建道路。下次在城市中散步時,您或許要想想,您究竟置身數字世界還是現實世界?
讓Artec Ray帶您了解激光雷達技術,擁抱技術優勢。









 語言選擇
語言選擇


 瀏覽量:367
瀏覽量:367


